线性变换与矩阵乘法
在前面的章节中,我们指出矩阵 \(\mathbf{X} \in \mathbb{R}^{m \times n}\) 乘一个向量 \(\bm{v} \in \mathbb{R}^{n \times 1}\),可以看作是将 \(\bm{v}\) 作为系数对矩阵 \(\mathbf{X}\)的列向量进行线性组合,得到一个新的 \(m\) 维向量。在本章,我们尝试从线性变换的角度重新理解这个过程。
线性变换的定义
设 \(V\) 和 \(W\) 是两个线性空间,如果存在一个映射 \(T: V \rightarrow W\),使得对于任意的 \(x, y \in V\) 和任意的常数 \(\alpha\),都有
可加性:\(T(x + y) = T(x) + T(y)\)
齐次性:\(T(\alpha x) = \alpha T(x)\)
那么我们称映射 \(T\) 是一个线性映射。
如果,一个线性映射是从一个线性空间到它自身的映射,即 \(T: V \rightarrow V\) ,那么我们称这个线性映射是一个线性变换。
对于一组基 \(\mathbf{X} \in \mathbb{R}^{n \times n}\),定义如下的变换
\[ T(\bm{v}) = \mathbf{X} \bm{v}, \]
可以验证,变换 \(T\) 是一个线性变换:
- 如果 \(\bm{v} \in \mathbb{R}^{n \times 1}\),那么 \(T(\bm{v}) = \mathbf{X} \bm{v} \in \mathbb{R}^{n \times 1}\)
- 可加性: \(T(\bm{v}_1 + \bm{v}_2) = \mathbf{X}(\bm{v}_1 + \bm{v}_2) = \mathbf{X} \bm{v}_1 + \mathbf{X} \bm{v}_2 = T(\bm{v}_1) + T(\bm{v}_2)\)
- 齐次性: \(T(\alpha \bm{v}) = \mathbf{X} \alpha \bm{v} = \alpha \mathbf{X} \bm{v} = \alpha T(\bm{v})\)
二维线性变换
在这一小节,我们尝试以二维线性变换为例,从几何的角度来感受一下线性变换。根据上文的定义,我们知道一个二维的线性变换可以用一个 \(2 \times 2\)的矩阵来表示
\[ \mathbf{X} = \begin{bmatrix} x_{11} & x_{12} \\ x_{21} & x_{22} \end{bmatrix}. \]
这个矩阵可以将一个二维向量 \(\bm{v} = \begin{bmatrix} v_1 & v_2 \end{bmatrix}^{\mathrm{T}}\) 变换为另一个二维向量
\[ \bm{v}' = \mathbf{X} \bm{v} = \begin{bmatrix} x_{11} v_1 + x_{12} v_2 \\ x_{21} v_1 + x_{22} v_2 \end{bmatrix}. \]
于此同时,我们对于二维平面上的一些常见操作,比如旋转,缩放等等,都比较熟悉,那么这些操作如何用矩阵来表示呢?
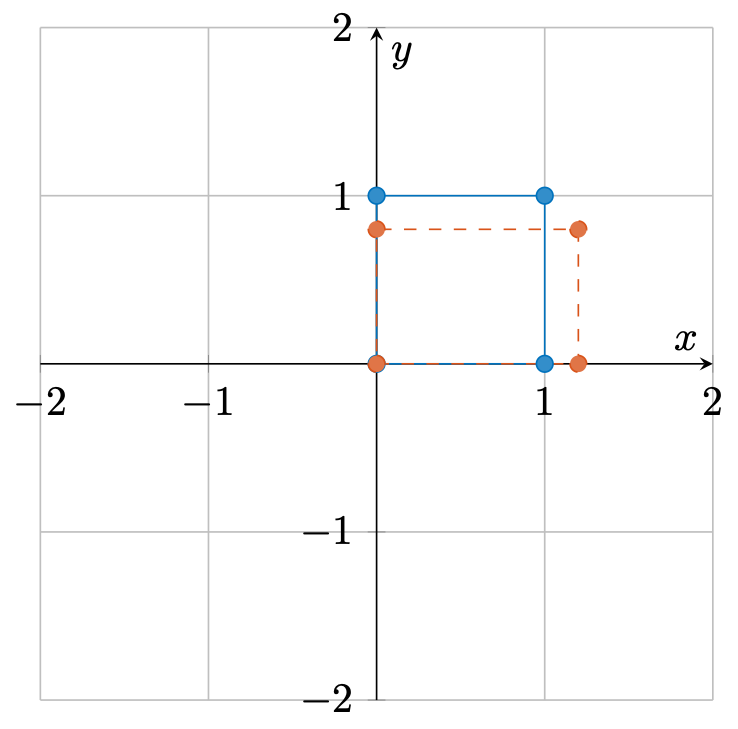
缩放
\[ \mathbf{X} = \begin{bmatrix} s_1 & 0 \\ 0 & s_2 \end{bmatrix}. \]
可以发现,变换后的向量分别在两个方向上被缩放了 \(s_1, s_2\) 倍
\[ \bm{v}' = \mathbf{X} \bm{v} = \begin{bmatrix} s_1 v_1 \\ s_2 v_2 \end{bmatrix}. \]
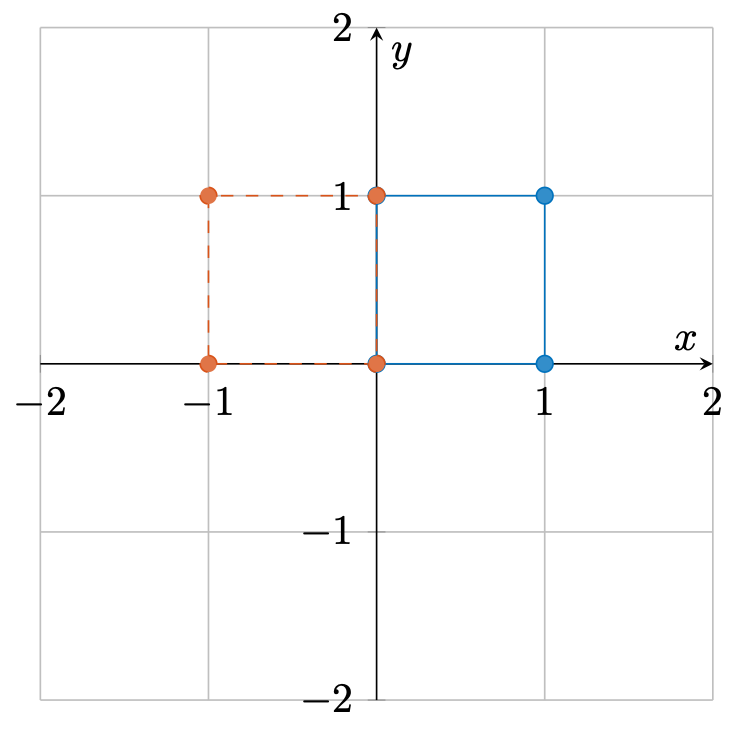
反射
\[ \mathbf{X} = \begin{bmatrix} -1 & 0 \\ 0 & 1 \end{bmatrix}. \]
此时,变换后的向量在第一个轴上被反转了
\[ \bm{v}' = \mathbf{X} \bm{v} = \begin{bmatrix} -v_1 \\ v_2 \end{bmatrix}. \]
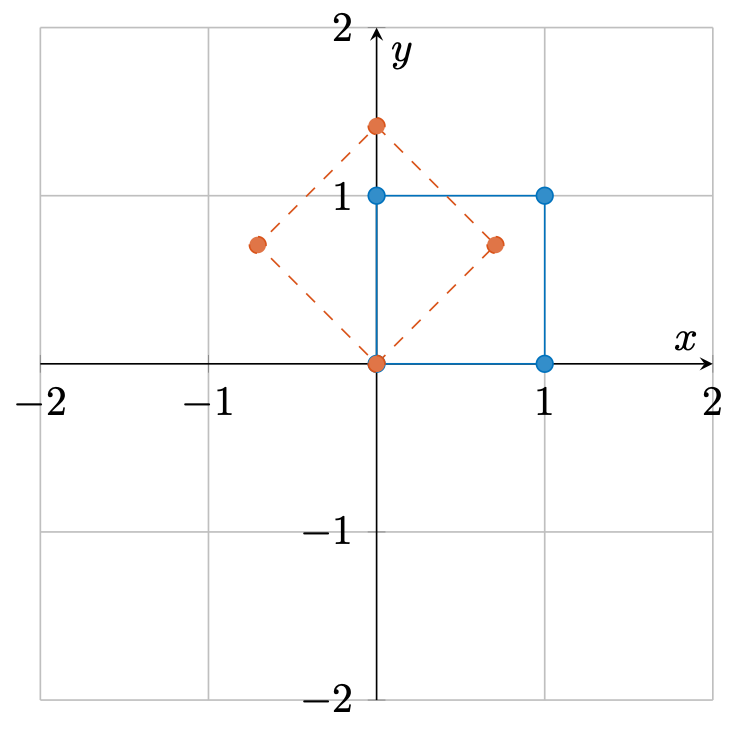
旋转
\[ \mathbf{X} = \begin{bmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{bmatrix}. \]
该矩阵相当将向量以原点为中心旋转了 \(\theta\) 度
\[ \bm{v}' = \mathbf{X} \bm{v} = \begin{bmatrix} \cos \theta v_1 - \sin \theta v_2 \\ \sin \theta v_1 + \cos \theta v_2 \end{bmatrix}. \]
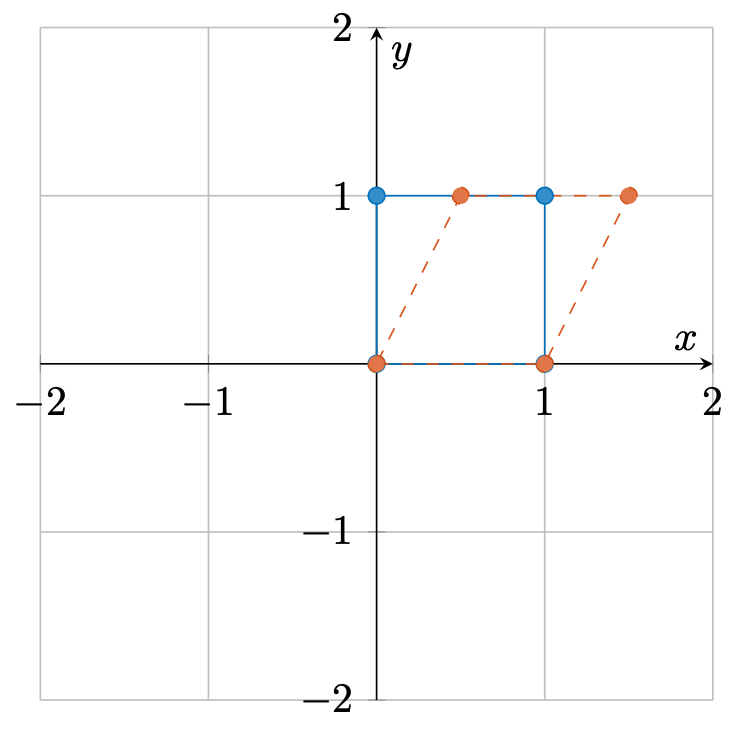
剪切
\[ \mathbf{X} = \begin{bmatrix} 1 & 0.5 \\ 0 & 1 \end{bmatrix}. \]
此时,变换后的向量为
\[ \bm{v}' = \mathbf{X} \bm{v} = \begin{bmatrix} v_1 + 0.5v_2 \\ v_2 \end{bmatrix}. \]
线性变换的组合
两个乃至多个线性变换的组合依旧是一个线性变换吗?这里我们简单证明一下,设有两个线性变换 \(T_1, T_2\) , 那么这两个线性变换的组合记作 \(T = T_1 \circ T_2\), 该变换满足
\[ T \bm{v} = (T_1 \circ T_2) \bm{v} = T_2(T_1(\bm{v})), \]
即线性变换的组合构成的新的变换 \(T\) 等价于先进行线性变换 \(T_1\) 然后再进行线性变换 \(T_2\)。可以验证
- 如果 \(\bm{v} \in \mathbb{R}^{n \times 1}\),那么 \(T_2(T_1(\bm{v})) \in \mathbb{R}^{n \times 1}\)
- 可加性: \(T(\bm{v}_1 + \bm{v}_2) = T_2(T_1(\bm{v}_1 + \bm{v}_2)) = T_2(T_1(\bm{v}_1) + T_1(\bm{v}_2)) = T_2(T_1(\bm{v}_1)) + T_2(T_1(\bm{v}_2)) = T(\bm{v}_1) + T(\bm{v}_2)\)
- 齐次性: \(T(\alpha \bm{v}) = T_2(T_1(\alpha \bm{v})) = T_2(\alpha T_1(\bm{v})) = \alpha T_2(T_1(\bm{v})) = \alpha T(\bm{v})\)
因此,\(T = T_1 \circ T_2\) 也是一个线性变换。设 \(T_1, T_2\)对应的变换矩阵分别为 \(\mathbf{A}, \mathbf{B} \in \mathbb{R}^{N \times N}\),那么 \(T\) 对应的矩阵该有什么表达呢?
注意到,对于线性变换 \(T\) 我们有
\[ T(\bm{v}) = T_2(T_1(\bm{v})) = \mathbf{B}(\mathbf{A} \bm{v}). \]
令 \(A_{ij}, B_{ij}\) 为矩阵 \(\mathbf{A}\) 和 \(\mathbf{B}\) 的第 \(i\) 行,第 \(j\) 列元素,则有如下等式
\[ (\mathbf{A} \bm{v})_k = \sum_{i=1}^{N} A_{ki} v_i, \]
\[ (\mathbf{B}(\mathbf{A} \bm{v}))_k = \sum_{j=1}^{N} B_{kj} (\mathbf{A} \bm{v})_j = \sum_{j=1}^{n} B_{kj} \sum_{i=1}^{N} A_{ji} v_i = \sum_{i=1}^N \left(\sum_{j=1}^N B_{kj} A_{ji}\right) v_i. \tag{1} \]
设 \(T\) 对应的矩阵为 \(\mathbf{C}\),则有
\[ T(\bm{v}) = \mathbf{C} \bm{v}, \]
变换后向量的第 \(k\) 个元素有如下表达式
\[ (\mathbf{C} \bm{v})_k = \sum_{i=1}^{N} C_{ki} v_i, \tag{2} \]
对比式 (1) 和式 (2) 可知,变换矩阵 \(\mathbf{C}\) 中的元素有如下表达式
\[ C_{ki} = \sum_{j=1}^{N} B_{kj} A_{ji}. \]
为了表达美观,我们可以将对应的变量进行替换,得到如下表达式
\[ C_{ij} = \sum_{k=1}^{N} B_{ik} A_{kj}. \tag{3} \]
我们将式 (3) 中的运算称作矩阵乘法,记作 \(\mathbf{C} = \mathbf{B} \mathbf{A}\)。
实际上,矩阵乘法可以这样计算,如 \(\mathbf{C} = \mathbf{B} \mathbf{A}\),那么矩阵 \(\mathbf{C}\) 的第 \(i,j\) 个元素 \(\mathbf{C}_{ij}\),为矩阵 \(\mathbf{B}\) 的第 \(i\) 行行向量 和矩阵 \(\mathbf{A}\) 的第 \(j\) 列列向量的内积。
此外,上文的推导都是基于方阵的(也就是行和列具有相同长度的矩阵)。对于一般的矩阵,同样可以使用矩阵乘法来计算,设有矩阵 \(\mathbf{A} \in \mathbb{R}^{M \times N}, \mathbf{B} \in \mathbb{R}^{N \times L}\),那么这两个矩阵的乘积为
\[ \mathbf{C} = \mathbf{A} \mathbf{B} \in \mathbb{R}^{M \times L}. \]
可以看到,如果两个矩阵能够进行矩阵乘法,那么第一个矩阵的每一行都和第二个矩阵的每一列都有相同的长度。正是这样,矩阵乘法并不满足交换率,显然 \(\mathbf{A} \mathbf{B}\) 能够计算并不代表 \(\mathbf{B} \mathbf{A}\) 也能进行矩阵乘法。
小结
- 线性变换可以用矩阵表示
- 常见的线性变换就几何意义来说,有缩放、反射、旋转、剪切
- 线性变换的组合可以用矩阵乘法表示